2024年5月29日(星期三)上午10:00,亚稳材料论坛第293期在先进结构材料中心319会议室顺利举行。本次论坛邀请到南京理工大学张文玲教授作主题报告。来自亚稳材料制备技术与科学国家重点实验室和材料科学与工程学院的三十余名师生参加了论坛。论坛由亚稳材料制备技术与科学国家重点实验室刘迎丹教授主持。
论坛上,张文玲教授作了题为《软体机器人的界面力学行为研究》的主题报告。张文玲教授生动地描述了软体机器人的应用前景、研究现状、结构机理和其中的技术难点,深入浅出地为广大师生介绍了其课题组设计的磁控软体机器人和自适应抓手。

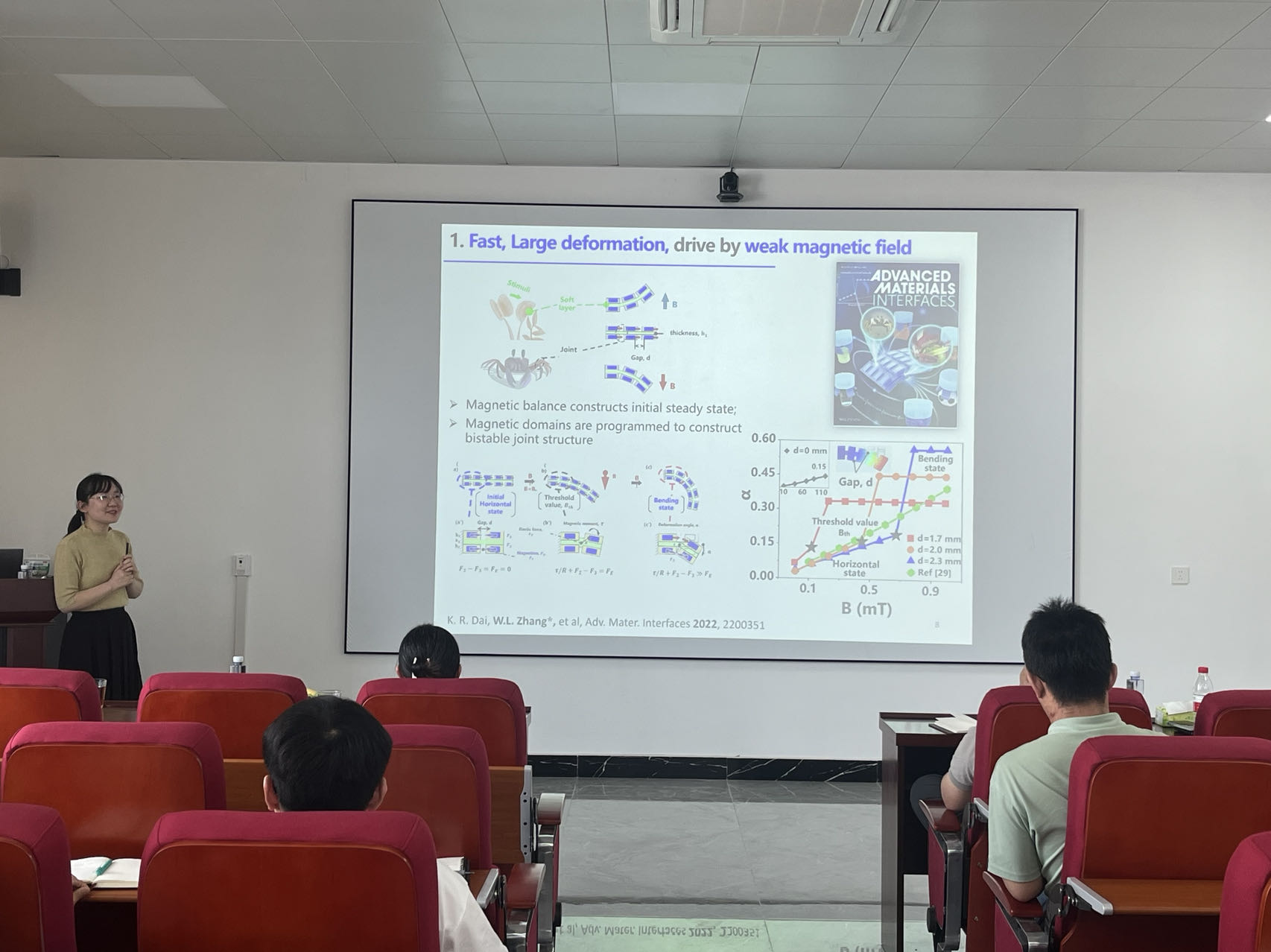
张文玲教授作报告
近年来,软体机器人具有多变环境优异的适应能力,在柔性抓手、封闭空间探测、生物医疗等领域引起广泛关注。然而,如何克服软体机器人大形变与高承载力之间的动态矛盾,同时赋予其精确感知和控制功能,是本领域的研究焦点。自然界生物体的高灵活性和环境适应能力为软体机器人的设计提供了思路。
在本研究中,受节肢动物和捕蝇草的启发,张文玲教授课题组设计了一种能在极低磁场下(<10mT)快速触发大形变的双稳态关节结构。进一步地,将低能耗的关节结构与仿蛞蝓触角传感集成,设计出可实现封闭狭小环境探测与避险的磁控软体机器人;在具有高内聚力的Muria折纸结构中嵌入摩擦电-力柔性传感器,设计了具有多模态感知的自适应抓手以及具有曲面共形接触感知的仿壁虎粘附抓手。
精彩报告现场
报告会后,与会各师生同张文玲教授进行了深入交流,交流过程极其热烈。会后,张文玲教授与学生进行亲切的交谈并参观了学院实验室,与有关课题组老师就后续合作研究进行初步沟通。亚稳材料论坛第293期圆满举办。






